吉林R100UIO電液伺服控制器測試系統(一定要看,2024已更新)
吉林R100UIO電液伺服控制器測試系統(一定要看,2024已更新)北京思路盛,快速準確地優化運動軸·可以用軟件界面上的滑塊來選擇適合您的控制系統的PID等增益值·?優化向導TuningWizard?內置繪圖Plots以圖形顯示RMC中任何寄存器·每個圖形可顯示多達32個寄存器參數·采樣分辨率和控制回路分辨率一致·調試和診斷監控所有軸的狀態寄存器和修改所有參數·
值得注意的是,預期的運動控制會受到不同因素的影響·輸出信號可以由PID控制的負反饋獲得,可以由前饋的計算獲得,也可由兩者的組合而獲得·無論是何種情況,在相同條件下獲得相同的控制信號都能使系統達到相同的速度·系統并不在乎控制信號是從前饋中得到的還是在PID控制中得到的·如果系統運動速度不高,為什么不僅僅提高PID增益呢?因為要確保系統的穩定性時,用于計算的反饋增益不能過大·通常,在不引起震蕩和失穩的條件下,想單靠增大PID增益來把誤差減小到可接受的水平是不可能的·從前饋中獲得控制信號的好處在于,前饋不須要像PID控制那樣依靠誤差信號來生成控制信號·設計穩定和便于調試的系統的關鍵,在于利用前饋來產生盡可能多的控制信號,同時盡量減少使用PID控制獲得控制信號,這樣結果的誤差就會達到·設計者要利用PID單元,去補償系統的環境因素(如溫度和濕度和系統響應中會隨時間改變的非線性部分(如系統的變化載荷,這些參數在前饋中是無法進行預測估值的·

帶有速度加速度加加速度前饋控制的全功能PID閉環控制.不同運動方向不同的增益參數的設定對流體運動系統的同步控制尤其適用.閉環控制控制模式?正交TTL編碼器?模擬信號接口±10V和4-20mARS-422開始/結束和PWM信號?磁致伸縮線性位移傳感器(MDT線性和單圈或多圈旋轉軸?同步串行接口(SSI?用于RMCTools軟件調試以及RMCLinkActiveX和.Net程序?USB接口?Profinet
稍微復雜但不用閉環的變通方法,是以距離函數來改變控制輸出作為反饋.用距離函數使控制輸出下降,通常是用一個PLC或者簡單的運動控制器來實現的.這種控制形式在對降速平穩性的要求高于對性要求的系統中更為適用.通常,這些系統中不需要的運動調節.
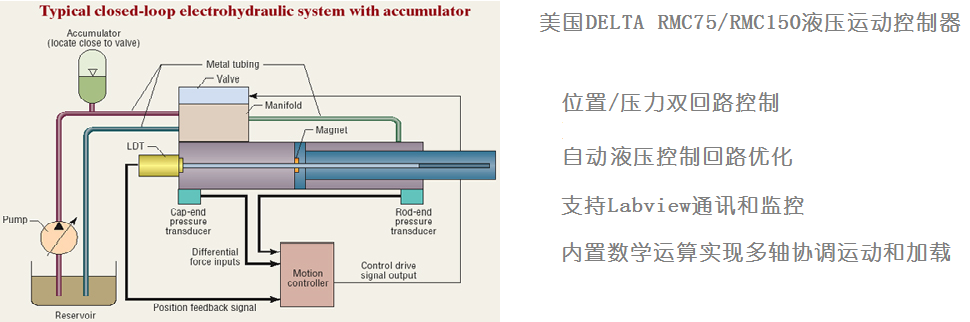
眾所周知,能夠提升和移動重載荷是流體動力的優勢·液壓系統能夠在耗費極少能量的情況下,提供很大的保持力·相比之下,電動機需要消耗較多的能量,因為電流必須流經電樞轉子來提供扭矩·在過去,液壓系統的動作不是特別,因為大部分的液壓閥是開關閥,而其控制方式常常是開環控制,或者使用不的反饋機制,例如限位開關或由操作員控制的操作桿·閉環壓力控制為液壓系統增添優勢當需要運算功能以及在設備控制過程復雜時·可以直接使用***表達式來靈活編寫程序·
注意,在曲線狀態為3之前,可以將軸移動到點.在跟隨曲線之前,軸的目標位置(目標壓力或力)必須在曲線的y軸位置(y0),在這個例子中是這可以通過使用移動命令來將軸移動到對于跟隨壓力或力曲線,需要將目標壓力/力移動到個點的Y值.移動至曲線的起始點
誤差與比例增益(將位置誤差單元轉化為輸出電壓或電流信號的比率相乘對輸出產生作用。使用閉環控制主要是因為它的靈活性準確性速度可控性以及在不同工況(例如負載變化下保持調節的能力。閉環控制將反饋裝置發送的位置反饋信號和理想位置做比較。的控制器用積分(I增益微分(D增益及前饋增益來提高比例(P增益。誤差越大糾正這個誤差的輸出信號就越大。的控制就是將持續的反饋和閉環控制相結合。隨著生產率要求的提高,越來越多的設備和生產過程需要使用更復雜的閉環控制器。

吉林R100UIO電液伺服控制器測試系統(一定要看,2024已更新),運動指令通過RMCTools軟件直接發送.使用快捷鍵快速發出指令可以縮短調試時間.?控制指令Commands編寫運動控制程序?控制器運行事件記錄EventLog控制器在運行過程中的參數修改指令運行故障發生和通訊事件都會在控制器中記錄下來.以便于快速發現故障原因.
這使得設定一個安全的位置點成為可能,在這點上即使負載或阻礙突然撤銷,執行機構也會停止動作。個問題出現在試圖做一個簡單的位置移動時。在這種模式下,控制器對位置和力的PID平行運作,并使用兩個的PID和前饋控制信號來驅動執行機構。然而,這種控制模式存在兩個問題。因為在位置控制模式下,活塞是由力來加速的,所以力的PID會輸出,致使執行機構落后于目標位置。執行機構保持運動,直到位置或力中的任何一個到達設定值為止。在這種情況下,力和位置都將達不到設定值,不過至少二者都不會超過設定值。首先是在實際的位置和力都非常接近設定值的時候。帶有力的位置控制模式(模式在許多應用上是更好的選擇。在大多數應用中,這個問題很容易解決,只要做到僅使用位置控制模式而忽略力反饋即可。
吉林R100UIO電液伺服控制器測試系統(一定要看,2024已更新),由于比例增益和微分增益不依賴目標位置和實際位置的誤差,當有“噪聲”信號時或者目標位置發生階躍改變時,控制器輸出響應不會產生太大改變。這種PID控制的不同之處,在于它僅使用誤差來計算積分增益(I,而比例增益(P和微分增益(D則用實際位置的負反饋來確定。用系統控制業內的術語來說,就是一個經過執行機構和負載良好調試的I-PD系統可以把控制器組合成一個有效的多級低通濾波器

積分增益(I在要求軸迅速而可靠地運動到位置的場合是必要的·正如上面指出的,一個純比例控制系統需要靠誤差來產生非零輸出·在理想狀態下,甚至一個很小的輸出信號就可以使執行機構移動到設定點·但是現實的機械系統中,閥的無效特性的變化或運動構件之間的靡擦,都會使執行機構無法到達設定的目標點·控制方程中的積分部分將誤差在時間上做積分,終使輸出增加或者“上發條上到”驅動執行機構能移動的所需值·
吉林R100UIO電液伺服控制器測試系統(一定要看,2024已更新),調節是選擇相關增量以便對運動控制系統的位置速度壓力或力進行控制的過程·調節壓力或力控制的執行機構與調節位置的系統不同,因為調節壓力時,液壓缸不會產生太大的移動·調節壓力或力的簡單的方法,是在所有增益設置為0的情況下,先使執行機構達到極限位置(完全伸出·然后僅對PID輸入設定值和一個小的比例增益·壓力或力控制的啟動和調節
理想狀態下,系統完全可以只用前饋增益來運作.但實際上,負載會變化而且系統中存在非線性部分,因此運動控制器需通過PID增益來輔助前饋功能.如果系統負載的增大要求用32%的控制信號代替之前的30%控制信號來達到3inch/sec,控制環路中的PID增益只須要提供2%的控制信號增益.由速度前饋提供的30%的控制信號,則完成了絕大部分的工作.

對于不同的操作者,閉環壓力控制能夠產品質量的穩定.例如,某制造商通過用閉環壓力控制代替金屬成型壓機上的操縱桿控制使技術水平懸殊很大的操作員們能夠生產出質量一致的產品.使機器能夠自動適應材料的不一致性和不同環境因素,例如溫度和濕度.使用從控制器上獲得的數據能夠方便的進行診斷和進程監控能夠協調大型壓力機的多部件和多軸動作.
